|
Nilorea Library
C utilities for networking, threading, graphics
|
|
Nilorea Library
C utilities for networking, threading, graphics
|
A* Pathfinding implementation for 2D and 3D grids. More...
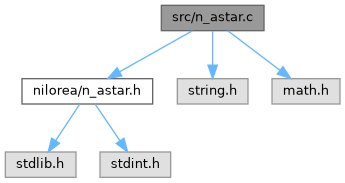
 Include dependency graph for n_astar.c:
Include dependency graph for n_astar.c:Go to the source code of this file.
Data Structures | |
| struct | ASTAR_BOX |
| Search window: the bounding box of (start, goal) expanded by ASTAR_SEARCH_MARGIN and clamped to the grid. More... | |
Functions | |
| static int | box_index (const ASTAR_BOX *b, int x, int y, int z) |
| Flat index into the window-local ASTAR_CELL array. | |
| static int | grid_index (const ASTAR_GRID *grid, int x, int y, int z) |
| Convert 3D coordinates to flat array index. | |
| static void | heap_free (ASTAR_HEAP *h) |
| static int | heap_grow (ASTAR_HEAP *h) |
| static ASTAR_HEAP * | heap_new (int capacity) |
| static ASTAR_HEAP_NODE | heap_pop (ASTAR_HEAP *h) |
| static void | heap_push (ASTAR_HEAP *h, int x, int y, int z, int f) |
| static void | heap_swap (ASTAR_HEAP_NODE *a, ASTAR_HEAP_NODE *b) |
| static int | iabs (int v) |
| Absolute value for integers. | |
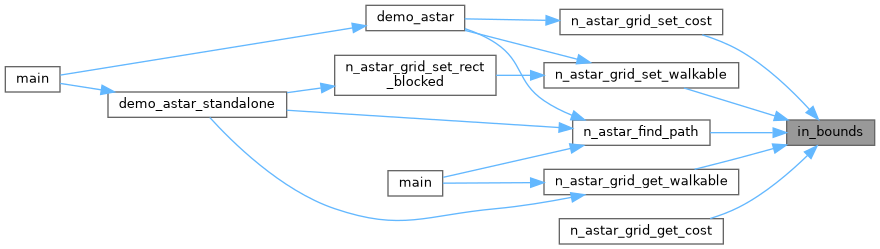
| static int | in_bounds (const ASTAR_GRID *grid, int x, int y, int z) |
| Check if coordinates are within grid bounds. | |
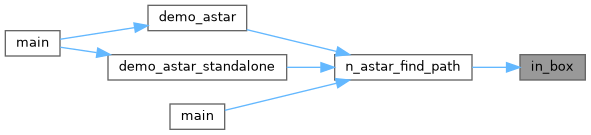
| static int | in_box (const ASTAR_BOX *b, int x, int y, int z) |
| Check if coordinates fall inside the search window. | |
| ASTAR_PATH * | n_astar_find_path (const ASTAR_GRID *grid, int sx, int sy, int sz, int gx, int gy, int gz, int diagonal, ASTAR_HEURISTIC heuristic) |
| Find a path using A* search. | |
| void | n_astar_grid_free (ASTAR_GRID *grid) |
| Free a grid and all its internal data. | |
| int | n_astar_grid_get_cost (const ASTAR_GRID *grid, int x, int y, int z) |
| Get a cell's movement cost multiplier. | |
| uint8_t | n_astar_grid_get_walkable (const ASTAR_GRID *grid, int x, int y, int z) |
| Get a cell's walkability. | |
| ASTAR_GRID * | n_astar_grid_new (int width, int height, int depth) |
| Create a new grid for A* pathfinding. | |
| void | n_astar_grid_set_cost (ASTAR_GRID *grid, int x, int y, int z, int cost) |
| Set a cell's movement cost multiplier. | |
| void | n_astar_grid_set_rect_blocked (ASTAR_GRID *grid, int x1, int y1, int z1, int x2, int y2, int z2) |
| Set a rectangular region as blocked (wall) | |
| void | n_astar_grid_set_walkable (ASTAR_GRID *grid, int x, int y, int z, uint8_t walkable) |
| Set a cell's walkability. | |
| int | n_astar_heuristic (int x1, int y1, int z1, int x2, int y2, int z2, ASTAR_HEURISTIC heuristic) |
| Compute heuristic distance between two 3D points. | |
| void | n_astar_path_free (ASTAR_PATH *path) |
| Free a path returned by n_astar_find_path. | |
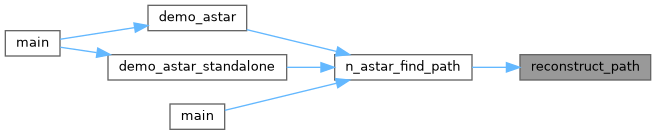
| static ASTAR_PATH * | reconstruct_path (ASTAR_CELL *cells, const ASTAR_BOX *box, int sx, int sy, int sz, int gx, int gy, int gz) |
| Build path from goal back to start following parent pointers. | |
Variables | |
| static const int | dir2d_cardinal [][2] |
| static const int | dir2d_diagonal [][2] |
| static const int | dir3d_cardinal [][3] |
| static const int | dir3d_diagonal [][3] |
A* Pathfinding implementation for 2D and 3D grids.
Uses a binary min-heap as the open list priority queue for O(log n) insert/extract operations, and a flat array for O(1) closed-set membership checks.
Based on:
Definition in file n_astar.c.
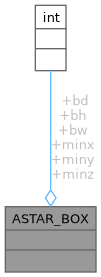
| struct ASTAR_BOX |
Search window: the bounding box of (start, goal) expanded by ASTAR_SEARCH_MARGIN and clamped to the grid.
The per-call ASTAR_CELL working set is allocated for this window only, NOT the whole grid, so a short path on a huge map costs a few KB instead of width*height*depth cells. The grid's own walkable[] / cost[] planes stay full-size and are still indexed by the absolute grid_index().
Collaboration diagram for ASTAR_BOX:| Data Fields | ||
|---|---|---|
| int | bd | window dimensions in cells |
| int | bh | |
| int | bw | |
| int | minx | |
| int | miny | |
| int | minz | window origin (absolute grid coords) |
|
inlinestatic |
Flat index into the window-local ASTAR_CELL array.
Definition at line 67 of file n_astar.c.
References ASTAR_BOX::bh, ASTAR_BOX::bw, ASTAR_BOX::minx, ASTAR_BOX::miny, and ASTAR_BOX::minz.
Referenced by n_astar_find_path(), and reconstruct_path().
Here is the caller graph for this function:
|
inlinestatic |
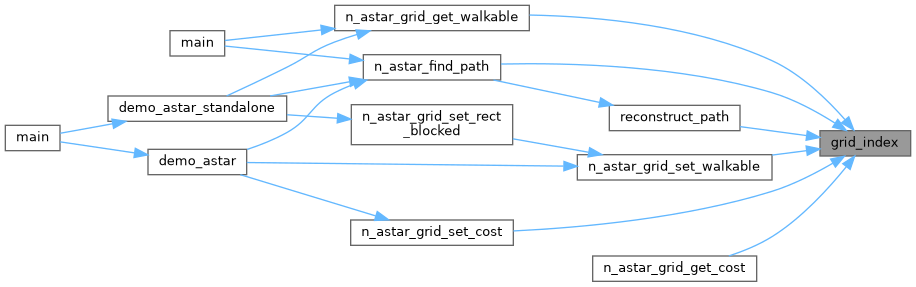
Convert 3D coordinates to flat array index.
Definition at line 44 of file n_astar.c.
References ASTAR_GRID::height, and ASTAR_GRID::width.
Referenced by n_astar_find_path(), n_astar_grid_get_cost(), n_astar_grid_get_walkable(), n_astar_grid_set_cost(), and n_astar_grid_set_walkable().
Here is the caller graph for this function:
|
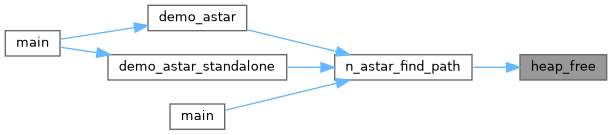
static |
Definition at line 99 of file n_astar.c.
References ASTAR_HEAP::data.
Referenced by n_astar_find_path().
Here is the caller graph for this function:
|
static |
Definition at line 105 of file n_astar.c.
References ASTAR_HEAP::capacity, and ASTAR_HEAP::data.
Referenced by heap_push().
Here is the caller graph for this function:
|
static |
Definition at line 85 of file n_astar.c.
References ASTAR_HEAP::capacity, ASTAR_HEAP::data, and ASTAR_HEAP::size.
Referenced by n_astar_find_path().
Here is the caller graph for this function:
|
static |
Definition at line 144 of file n_astar.c.
References ASTAR_HEAP::data, ASTAR_HEAP_NODE::f, heap_swap(), and ASTAR_HEAP::size.
Referenced by n_astar_find_path().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 121 of file n_astar.c.
References ASTAR_HEAP::capacity, ASTAR_HEAP::data, ASTAR_HEAP_NODE::f, heap_grow(), heap_swap(), ASTAR_HEAP::size, ASTAR_HEAP_NODE::x, ASTAR_HEAP_NODE::y, and ASTAR_HEAP_NODE::z.
Referenced by n_astar_find_path().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 115 of file n_astar.c.
Referenced by heap_pop(), and heap_push().
Here is the caller graph for this function:
|
inlinestatic |
Absolute value for integers.
Definition at line 79 of file n_astar.c.
Referenced by n_astar_heuristic().
Here is the caller graph for this function:
|
inlinestatic |
Check if coordinates are within grid bounds.
Definition at line 49 of file n_astar.c.
References ASTAR_GRID::depth, ASTAR_GRID::height, and ASTAR_GRID::width.
Referenced by n_astar_find_path(), n_astar_grid_get_cost(), n_astar_grid_get_walkable(), n_astar_grid_set_cost(), and n_astar_grid_set_walkable().
Here is the caller graph for this function:
|
inlinestatic |
Check if coordinates fall inside the search window.
Definition at line 72 of file n_astar.c.
References ASTAR_BOX::bd, ASTAR_BOX::bh, ASTAR_BOX::bw, ASTAR_BOX::minx, ASTAR_BOX::miny, and ASTAR_BOX::minz.
Referenced by n_astar_find_path().
Here is the caller graph for this function:
|
static |
Build path from goal back to start following parent pointers.
Definition at line 373 of file n_astar.c.
References ASTAR_BOX::bd, ASTAR_BOX::bh, box_index(), ASTAR_BOX::bw, ASTAR_PATH::cost, ASTAR_CELL::g, ASTAR_PATH::length, ASTAR_PATH::nodes, ASTAR_CELL::parent_x, ASTAR_CELL::parent_y, ASTAR_CELL::parent_z, ASTAR_NODE::x, ASTAR_NODE::y, and ASTAR_NODE::z.
Referenced by n_astar_find_path().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 427 of file n_astar.c.
Referenced by n_astar_find_path().
|
static |
Definition at line 432 of file n_astar.c.
Referenced by n_astar_find_path().
|
static |
Definition at line 440 of file n_astar.c.
Referenced by n_astar_find_path().
|
static |
Definition at line 447 of file n_astar.c.
Referenced by n_astar_find_path().