|
Nilorea Library
C utilities for networking, threading, graphics
|
|
Nilorea Library
C utilities for networking, threading, graphics
|
Data Structures | |
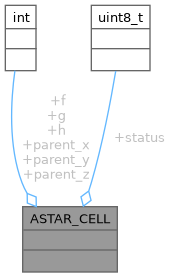
| struct | ASTAR_CELL |
| Internal node data used during pathfinding. More... | |
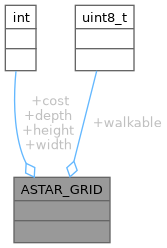
| struct | ASTAR_GRID |
| Grid structure holding walkability, costs, and dimensions. More... | |
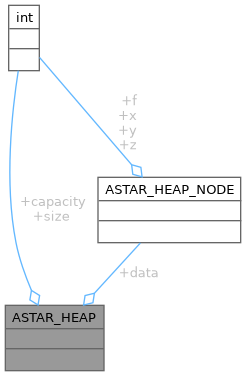
| struct | ASTAR_HEAP |
| Binary min-heap (priority queue) for the open list. More... | |
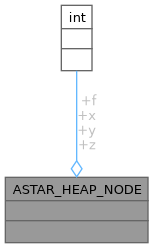
| struct | ASTAR_HEAP_NODE |
| Min-heap entry for the open list priority queue. More... | |
| struct | ASTAR_NODE |
| A single node in the resulting path. More... | |
| struct | ASTAR_PATH |
| The computed path result. More... | |
Macros | |
| #define | ASTAR_ALLOW_DIAGONAL 1 |
| Movement mode: 8-dir (2D) or 26-dir (3D) | |
| #define | ASTAR_CARDINAL_ONLY 0 |
| Movement mode: 4-dir (2D) or 6-dir (3D) | |
| #define | ASTAR_COST_CARDINAL 1000 |
| Default cost for straight movement (fixed-point x1000) | |
| #define | ASTAR_COST_DIAGONAL 1414 |
| Default cost for 2D diagonal movement (sqrt(2)*1000) | |
| #define | ASTAR_COST_DIAGONAL3D 1732 |
| Default cost for 3D diagonal movement (sqrt(3)*1000) | |
| #define | ASTAR_NODE_CLOSED 2 |
| Node has been fully evaluated. | |
| #define | ASTAR_NODE_NONE 0 |
| Node has not been visited. | |
| #define | ASTAR_NODE_OPEN 1 |
| Node is in the open list. | |
| #define | ASTAR_SEARCH_MARGIN 128 |
| Search-window margin (in cells) added around the bounding box of the start and goal. | |
Enumerations | |
| enum | ASTAR_HEURISTIC { ASTAR_HEURISTIC_MANHATTAN = 0 , ASTAR_HEURISTIC_EUCLIDEAN , ASTAR_HEURISTIC_CHEBYSHEV } |
| Heuristic function selection for h(n) estimation. More... | |
Functions | |
| ASTAR_PATH * | n_astar_find_path (const ASTAR_GRID *grid, int sx, int sy, int sz, int gx, int gy, int gz, int diagonal, ASTAR_HEURISTIC heuristic) |
| find a path using A* search, returns NULL if no path exists | |
| void | n_astar_grid_free (ASTAR_GRID *grid) |
| free a grid and all its internal data | |
| int | n_astar_grid_get_cost (const ASTAR_GRID *grid, int x, int y, int z) |
| get a cell's movement cost multiplier (x1000) | |
| uint8_t | n_astar_grid_get_walkable (const ASTAR_GRID *grid, int x, int y, int z) |
| get a cell's walkability (1=passable, 0=blocked, 0 if out of bounds) | |
| ASTAR_GRID * | n_astar_grid_new (int width, int height, int depth) |
| create a new grid for pathfinding, all cells default to walkable | |
| void | n_astar_grid_set_cost (ASTAR_GRID *grid, int x, int y, int z, int cost) |
| set a cell's movement cost multiplier (x1000) | |
| void | n_astar_grid_set_rect_blocked (ASTAR_GRID *grid, int x1, int y1, int z1, int x2, int y2, int z2) |
| set a rectangular region as blocked | |
| void | n_astar_grid_set_walkable (ASTAR_GRID *grid, int x, int y, int z, uint8_t walkable) |
| set a cell's walkability (1=passable, 0=blocked) | |
| int | n_astar_heuristic (int x1, int y1, int z1, int x2, int y2, int z2, ASTAR_HEURISTIC heuristic) |
| compute heuristic distance between two points (x1000) | |
| void | n_astar_path_free (ASTAR_PATH *path) |
| free a path returned by n_astar_find_path | |
| struct ASTAR_CELL |
| struct ASTAR_GRID |
Grid structure holding walkability, costs, and dimensions.
 Collaboration diagram for ASTAR_GRID:
Collaboration diagram for ASTAR_GRID:| struct ASTAR_HEAP |
Collaboration diagram for ASTAR_HEAP:| Data Fields | ||
|---|---|---|
| int | capacity | allocated capacity |
| ASTAR_HEAP_NODE * | data | heap array |
| int | size | current number of elements |
| struct ASTAR_HEAP_NODE |
| struct ASTAR_NODE |
| struct ASTAR_PATH |
The computed path result.
Collaboration diagram for ASTAR_PATH:| Data Fields | ||
|---|---|---|
| int | cost | total path cost (x1000 fixed-point) |
| int | length | number of nodes in the path |
| ASTAR_NODE * | nodes | array of path nodes from start to goal |
| #define ASTAR_ALLOW_DIAGONAL 1 |
Movement mode: 8-dir (2D) or 26-dir (3D)
| #define ASTAR_CARDINAL_ONLY 0 |
Movement mode: 4-dir (2D) or 6-dir (3D)
| #define ASTAR_COST_CARDINAL 1000 |
Default cost for straight movement (fixed-point x1000)
| #define ASTAR_COST_DIAGONAL 1414 |
| #define ASTAR_COST_DIAGONAL3D 1732 |
| #define ASTAR_SEARCH_MARGIN 128 |
Search-window margin (in cells) added around the bounding box of the start and goal.
n_astar_find_path() allocates its per-call working set for this window only, not the whole grid, so a short path on a huge map costs a few KB instead of width*height*depth cells. A route that must detour more than this many cells outside the start-goal box will not be found (the call returns NULL). Raise it if you need wider detours at the cost of a larger per-call allocation.
| enum ASTAR_HEURISTIC |
| ASTAR_PATH * n_astar_find_path | ( | const ASTAR_GRID * | grid, |
| int | sx, | ||
| int | sy, | ||
| int | sz, | ||
| int | gx, | ||
| int | gy, | ||
| int | gz, | ||
| int | diagonal, | ||
| ASTAR_HEURISTIC | heuristic | ||
| ) |
find a path using A* search, returns NULL if no path exists
find a path using A* search, returns NULL if no path exists
| grid | the grid to search |
| sx | start X |
| sy | start Y |
| sz | start Z |
| gx | goal X |
| gy | goal Y |
| gz | goal Z |
| diagonal | ASTAR_CARDINAL_ONLY or ASTAR_ALLOW_DIAGONAL |
| heuristic | heuristic function to use |
Definition at line 485 of file n_astar.c.
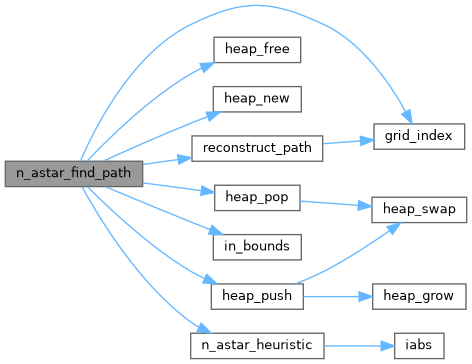
References ASTAR_COST_CARDINAL, ASTAR_COST_DIAGONAL, ASTAR_COST_DIAGONAL3D, ASTAR_NODE_CLOSED, ASTAR_NODE_NONE, ASTAR_NODE_OPEN, ASTAR_SEARCH_MARGIN, ASTAR_BOX::bd, ASTAR_BOX::bh, box_index(), ASTAR_BOX::bw, ASTAR_PATH::cost, ASTAR_GRID::cost, ASTAR_GRID::depth, dir2d_cardinal, dir2d_diagonal, dir3d_cardinal, dir3d_diagonal, ASTAR_CELL::f, ASTAR_CELL::g, grid_index(), ASTAR_CELL::h, heap_free(), heap_new(), heap_pop(), heap_push(), ASTAR_GRID::height, in_bounds(), in_box(), ASTAR_PATH::length, ASTAR_BOX::minx, ASTAR_BOX::miny, ASTAR_BOX::minz, n_astar_heuristic(), ASTAR_PATH::nodes, ASTAR_CELL::parent_x, ASTAR_CELL::parent_y, ASTAR_CELL::parent_z, reconstruct_path(), ASTAR_HEAP::size, ASTAR_CELL::status, ASTAR_GRID::walkable, ASTAR_GRID::width, ASTAR_NODE::x, ASTAR_HEAP_NODE::x, ASTAR_NODE::y, ASTAR_HEAP_NODE::y, ASTAR_NODE::z, and ASTAR_HEAP_NODE::z.
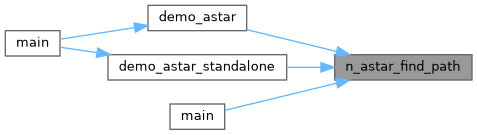
Referenced by demo_astar(), demo_astar_standalone(), and main().
Here is the call graph for this function: Here is the caller graph for this function:| void n_astar_grid_free | ( | ASTAR_GRID * | grid | ) |
free a grid and all its internal data
free a grid and all its internal data
| grid | grid to free (safe to pass NULL) |
Definition at line 271 of file n_astar.c.
References ASTAR_GRID::cost, and ASTAR_GRID::walkable.
Referenced by demo_astar(), demo_astar_standalone(), and main().
Here is the caller graph for this function:| int n_astar_grid_get_cost | ( | const ASTAR_GRID * | grid, |
| int | x, | ||
| int | y, | ||
| int | z | ||
| ) |
get a cell's movement cost multiplier (x1000)
get a cell's movement cost multiplier (x1000)
| grid | the grid |
| x | cell X coordinate |
| y | cell Y coordinate |
| z | cell Z coordinate |
Definition at line 325 of file n_astar.c.
References ASTAR_GRID::cost, grid_index(), and in_bounds().
Here is the call graph for this function:| uint8_t n_astar_grid_get_walkable | ( | const ASTAR_GRID * | grid, |
| int | x, | ||
| int | y, | ||
| int | z | ||
| ) |
get a cell's walkability (1=passable, 0=blocked, 0 if out of bounds)
get a cell's walkability (1=passable, 0=blocked, 0 if out of bounds)
| grid | the grid |
| x | cell X coordinate |
| y | cell Y coordinate |
| z | cell Z coordinate |
Definition at line 299 of file n_astar.c.
References grid_index(), in_bounds(), and ASTAR_GRID::walkable.
Referenced by demo_astar_standalone(), and main().
Here is the call graph for this function: Here is the caller graph for this function:| ASTAR_GRID * n_astar_grid_new | ( | int | width, |
| int | height, | ||
| int | depth | ||
| ) |
create a new grid for pathfinding, all cells default to walkable
create a new grid for pathfinding, all cells default to walkable
| width | grid width (X) |
| height | grid height (Y) |
| depth | grid depth (Z, use 1 for 2D) |
Definition at line 235 of file n_astar.c.
References ASTAR_COST_CARDINAL, ASTAR_GRID::cost, ASTAR_GRID::depth, ASTAR_GRID::height, ASTAR_GRID::walkable, and ASTAR_GRID::width.
Referenced by demo_astar(), and demo_astar_standalone().
Here is the caller graph for this function:| void n_astar_grid_set_cost | ( | ASTAR_GRID * | grid, |
| int | x, | ||
| int | y, | ||
| int | z, | ||
| int | cost | ||
| ) |
set a cell's movement cost multiplier (x1000)
set a cell's movement cost multiplier (x1000)
| grid | the grid |
| x | cell X coordinate |
| y | cell Y coordinate |
| z | cell Z coordinate |
| cost | cost multiplier (x1000) |
Definition at line 312 of file n_astar.c.
References ASTAR_GRID::cost, grid_index(), and in_bounds().
Referenced by demo_astar().
Here is the call graph for this function: Here is the caller graph for this function:| void n_astar_grid_set_rect_blocked | ( | ASTAR_GRID * | grid, |
| int | x1, | ||
| int | y1, | ||
| int | z1, | ||
| int | x2, | ||
| int | y2, | ||
| int | z2 | ||
| ) |
set a rectangular region as blocked
set a rectangular region as blocked
| grid | the grid |
| x1 | start corner X (inclusive) |
| y1 | start corner Y (inclusive) |
| z1 | start corner Z (inclusive) |
| x2 | end corner X (inclusive) |
| y2 | end corner Y (inclusive) |
| z2 | end corner Z (inclusive) |
Definition at line 340 of file n_astar.c.
References n_astar_grid_set_walkable().
Referenced by demo_astar_standalone().
Here is the call graph for this function: Here is the caller graph for this function:| void n_astar_grid_set_walkable | ( | ASTAR_GRID * | grid, |
| int | x, | ||
| int | y, | ||
| int | z, | ||
| uint8_t | walkable | ||
| ) |
set a cell's walkability (1=passable, 0=blocked)
set a cell's walkability (1=passable, 0=blocked)
| grid | the grid |
| x | cell X coordinate |
| y | cell Y coordinate |
| z | cell Z coordinate |
| walkable | 1=passable, 0=blocked |
Definition at line 286 of file n_astar.c.
References grid_index(), in_bounds(), and ASTAR_GRID::walkable.
Referenced by demo_astar(), and n_astar_grid_set_rect_blocked().
Here is the call graph for this function: Here is the caller graph for this function:| int n_astar_heuristic | ( | int | x1, |
| int | y1, | ||
| int | z1, | ||
| int | x2, | ||
| int | y2, | ||
| int | z2, | ||
| ASTAR_HEURISTIC | heuristic | ||
| ) |
compute heuristic distance between two points (x1000)
compute heuristic distance between two points (x1000)
| x1 | first point X |
| y1 | first point Y |
| z1 | first point Z |
| x2 | second point X |
| y2 | second point Y |
| z2 | second point Z |
| heuristic | the heuristic to use |
Definition at line 184 of file n_astar.c.
References ASTAR_COST_CARDINAL, ASTAR_COST_DIAGONAL, ASTAR_COST_DIAGONAL3D, ASTAR_HEURISTIC_CHEBYSHEV, ASTAR_HEURISTIC_EUCLIDEAN, ASTAR_HEURISTIC_MANHATTAN, and iabs().
Referenced by n_astar_find_path().
Here is the call graph for this function: Here is the caller graph for this function:| void n_astar_path_free | ( | ASTAR_PATH * | path | ) |
free a path returned by n_astar_find_path
free a path returned by n_astar_find_path
| path | path to free (safe to pass NULL) |
Definition at line 759 of file n_astar.c.
References ASTAR_PATH::nodes.
Referenced by demo_astar(), demo_astar_standalone(), and main().
Here is the caller graph for this function: