|
Nilorea Library
C utilities for networking, threading, graphics
|
|
Nilorea Library
C utilities for networking, threading, graphics
|
Trajectory interpolation and dead reckoning for 2D/3D networked simulations. More...
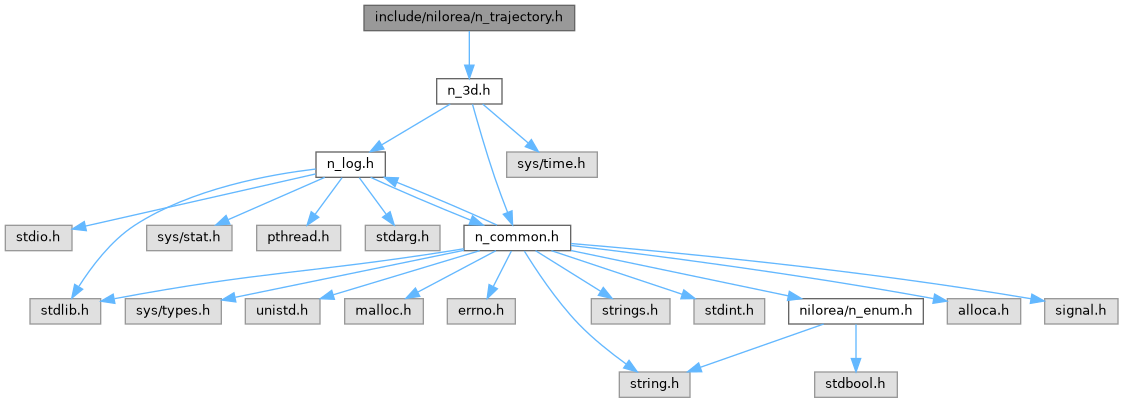
#include "n_3d.h" Include dependency graph for n_trajectory.h: This graph shows which files directly or indirectly include this file:
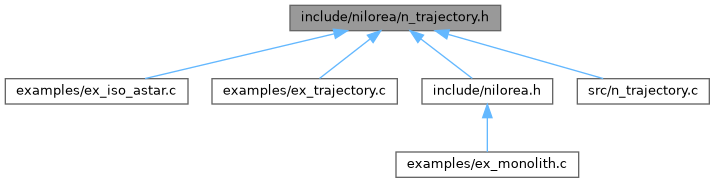
Include dependency graph for n_trajectory.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | TRAJECTORY |
| structure holding all data for trajectory interpolation / extrapolation More... | |
| struct | TRAJECTORY_POINT |
| a single waypoint in a multi-point trajectory path More... | |
Macros | |
| #define | TRAJECTORY_2D 2 |
| use 2 components (x,y) for trajectory computation | |
| #define | TRAJECTORY_3D 3 |
| use 3 components (x,y,z) for trajectory computation | |
| #define | TRAJECTORY_BEFORE 3 |
| trajectory is extrapolating before the start state using quadratic motion | |
| #define | TRAJECTORY_EXTRAP 2 |
| trajectory is extrapolating beyond the end state using quadratic motion | |
| #define | TRAJECTORY_INTERP 1 |
| trajectory is interpolating along the cubic Hermite spline between start and end | |
Functions | |
| int | trajectory_add_point (TRAJECTORY *traj, const PHYSICS *state, double time_val) |
| add a waypoint to the multi-point path (times must be strictly increasing) | |
| int | trajectory_clear_points (TRAJECTORY *traj) |
| clear all waypoints from the multi-point path | |
| int | trajectory_compute (TRAJECTORY *traj, double time_val) |
| compute full state (position, speed, acceleration, orientation) at given time | |
| void | trajectory_delete (TRAJECTORY **traj) |
| free a trajectory | |
| double | trajectory_distance (TRAJECTORY *traj, double time_a, double time_b, int steps) |
| distance along the trajectory between two times | |
| int | trajectory_get_acceleration (TRAJECTORY *traj, double time_val, VECTOR3D out) |
| compute only acceleration at given time, stores result in out | |
| int | trajectory_get_orientation (TRAJECTORY *traj, double time_val, VECTOR3D out) |
| compute only orientation at given time, stores result in out | |
| int | trajectory_get_position (TRAJECTORY *traj, double time_val, VECTOR3D out) |
| compute only position at given time, stores result in out | |
| int | trajectory_get_speed (TRAJECTORY *traj, double time_val, VECTOR3D out) |
| compute only speed at given time, stores result in out | |
| TRAJECTORY * | trajectory_new (int nb_components) |
| allocate a new trajectory for 2D or 3D use | |
| int | trajectory_set_end (TRAJECTORY *traj, const PHYSICS *state, double time_val) |
| set the terminal state and time of the trajectory, recomputes Hermite tangents | |
| int | trajectory_set_start (TRAJECTORY *traj, const PHYSICS *state, double time_val) |
| set the initial state and time of the trajectory | |
| int | trajectory_update (TRAJECTORY *traj, const PHYSICS *new_end, double time_val) |
| shift: old end becomes new start, set a new end state (for continuous dead reckoning updates) | |
Trajectory interpolation and dead reckoning for 2D/3D networked simulations.
Implementation of the "Defeating Lag With Cubic Splines" approach (GameDev.net Article 914 by Nicholas Van Caldwell) combined with cubic Hermite spline interpolation and quadratic extrapolation.
The API provides smooth movement prediction for networked games and local simulations by:
Works for both 2D (xy) and 3D (xyz) coordinate systems.
Time units are user-defined: as long as position, speed, acceleration, and time values use consistent units, the math works. For example:
Definition in file n_trajectory.h.